
A new continuum robot designed by Vanderbilt engineers achieves multi-scale motion and may open up a huge world of previously impossible complex microsurgeries.
The robot is capable of providing both a large macro motion workspace as necessary for surgical intervention and a small micro motions workspace with motion resolutions of 1 micron or less. For a sense of scale, an inch contains 25,400 microns. A human red blood cell is about eight microns wide, the same size as some bacteria and significantly smaller than the width of the average human hair.
“Our design achieves motion resolutions of 1 micron or less by using inexpensive actuators. This reconfiguration—with minimal added cost—could accelerate the development of a new class of surgical robots capable of both macro-motion for surgical intervention and micro-scale motion for cellular-level imaging or intervention,” said Nabil Simaan, professor of mechanical engineering and director of the Advanced Robotics and Mechanism Applications Laboratory.
“This greatly expands the capabilities of robotics in minimally invasive surgery,” he said.
The miniaturization and range of motion would allow precise control during procedures on complex aneurysms, tiny veins and arteries, nerves and the delicate structures of the eye, the inner ear and the vocal cords. Potential applications include biopsies, tumor eradication and targeted drug delivery at the cellular level.
Simaan and his team have adapted the flexible architecture of his previous continuum robot to perform at the macro and micro scale by altering the equilibrium pose of the robot, which Simaan calls continuum robots with equilibrium modulation, or CREM.
The flexible architecture of previous continuum robots achieved a worm-like motion for macro-manipulation. The robot is segmented with discs or rings like the body of an earthworm. Each disc is joined together by tiny backbones, or actuation tubes. By adding small elastic wires inside the actuation tubes and moving wires up or down, the static equilibrium of the plates changes, creating motion at the micrometer scale.
“This new class of robots will provide micro-precision while traversing macroscale sinuous pathways to the operation site. Potential benefits include exact tissue reconstruction and complete surgical eradication of tumors,” said Simaan, an affiliate of the Vanderbilt Institute for Surgery and Engineering.
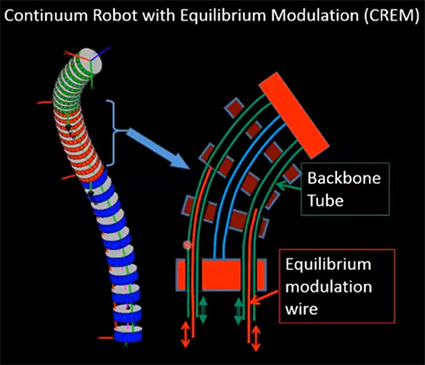
The robot uses tubular secondary backbones to achieve the large scale of motion. By pushing and pulling on them, the continuum robot configuration changes. The addition of wires that can slide in and out of the tubular backbones enabled the research team to modulate the equilibrium shape.
Additionally, extensive testing is underway for the incorporation of optical coherence tomography, which is effectively “optical ultrasound” that allows imaging reflections from within tissue.
Simaan and his colleagues, mechanical engineering graduate student Giuseppe Del Giudice, Research Assistant Professor of Ophthalmology and Visual Science Jin-Hui Shen and physician Karen M. Joos, Joseph N. and Barbara H. Ellis Family Professor of Ophthalmology, have accomplished a preliminary integration of a custom-made OCT probe.
Joos’ particular research interest is the use of miniature OCT probes with robotic surgical tools to improve visualization for procedures inside the eye. Del Giudice’s expertise is in design and control of micro-continuum medical robots, specifically micromanipulation for ophthalmic surgery.
Extending the capabilities of a standard continuum robot in terms of micro-scale motion and targeting could have a deep impact in microsurgery by providing significantly increased dexterity, controllability and precision to surgeons or even the pioneering of previously impossible procedures, Simaan said.
The Vanderbilt Center for Technology Transfer and Commercialization has filed a provisional application for U.S. patent protection on the invention.
This research is supported by the National Science Foundation (Grant CMMI 1537659).
Contact: Brenda Ellis, 615 343-6314
brenda.ellis@vanderbilt.edu